Exploring Synthetic Image Generation for Training Computer Vision Models under Data Scarcity
Enric Moreu, B.E., M.E.
Supervised by Prof. Noel E. O’Connor and Co-supervised by Dr. Kevin McGuinness
August 2023
Index
- 3D-based synthetic data
- Domain Randomization
- Domain Adaptation
- Pseudo-labels
- Contributions
- Conclusions
3D-based synthetic data
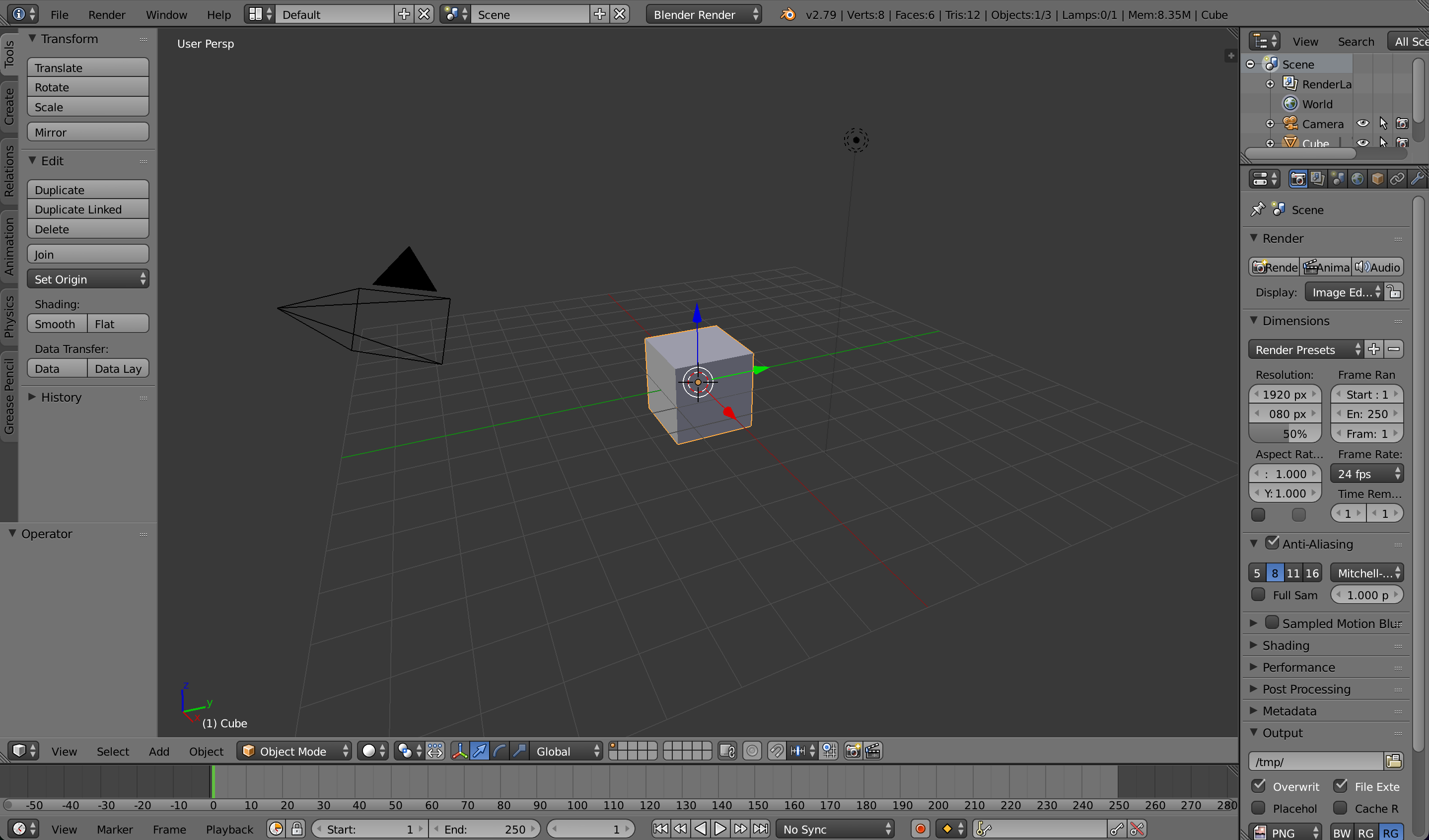
3D environment
3D-based synthetic data
3D model
3D-based synthetic data

Background image
3D-based synthetic data

Lighting and camera parameters
3D-based synthetic data
- Unlimited
- Perfectly annotated
- Balanced distribution
- Doesn't contain sensitive information
How realistic should synthetic images be?
How realistic should synthetic images be?
85,324 faces
102 faces
Domain Randomization
☐Enric Moreu et al. “Domain Randomization for Object Counting”. In Irish Conference on Artificial Intelligence and Cognitive Science (AICS). December 2021.By default, computer vision models learn to extrapolate between domains
Synthetic
⟶
Real
Synthetic
Real
Domain randomization makes the model interpolate to the target domain

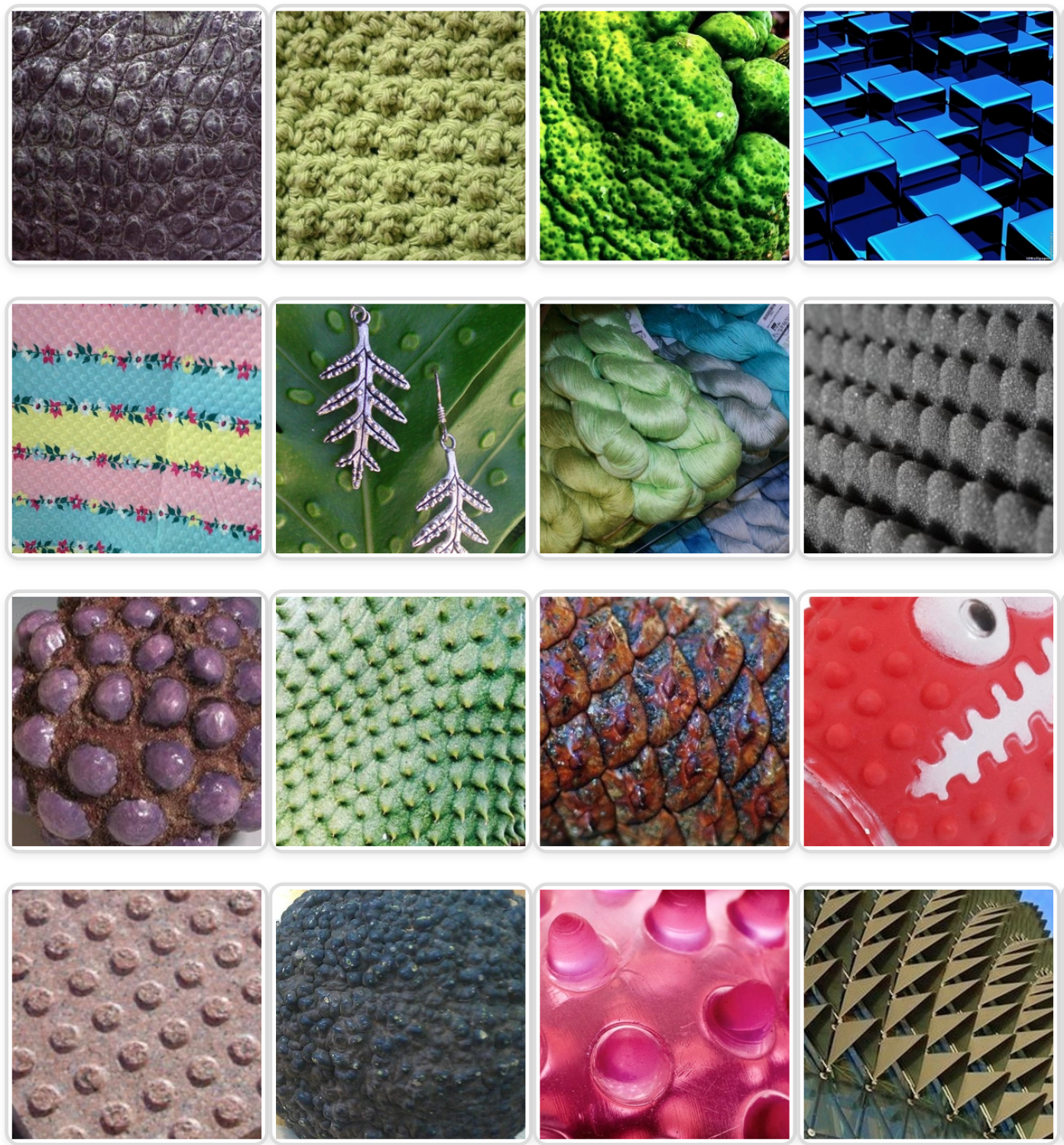
Randomizing a synthetic dataset

Randomizing a synthetic dataset
import random
from sklearn.datasets import make_blobs
light_intensity = random.uniform(0.1, 2)
X, _ = make_blobs(n_samples=100, centers=10, n_features=2)
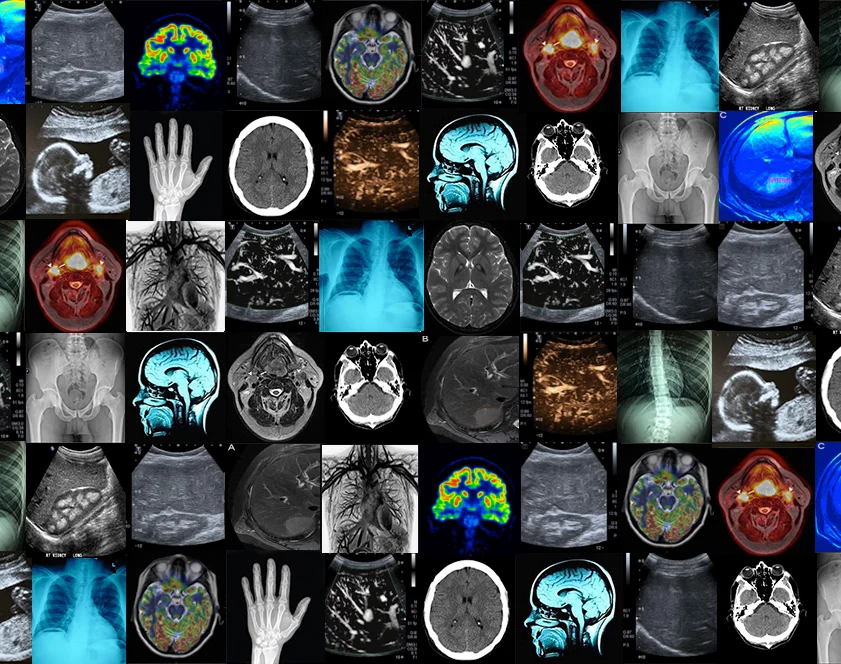
Domain Randomization doesn't work for domains with low variance
 Source:
Source: Domain adaptation
☐Enric Moreu et al. “Synthetic data for unsupervised polyp
segmentation”. In Irish Conference on Artificial Intelligence and Cognitive
Science (AICS). December 2021.
☐Enric Moreu et al. “Joint one-sided synthetic unpaired image translation and segmentation for colorectal cancer prevention”. In Expert Systems. September 2022.
☐Enric Moreu et al. “Joint one-sided synthetic unpaired image translation and segmentation for colorectal cancer prevention”. In Expert Systems. September 2022.
Synthetic
⟶
Real
Domain adaptation reduces the dissimilarity between domains
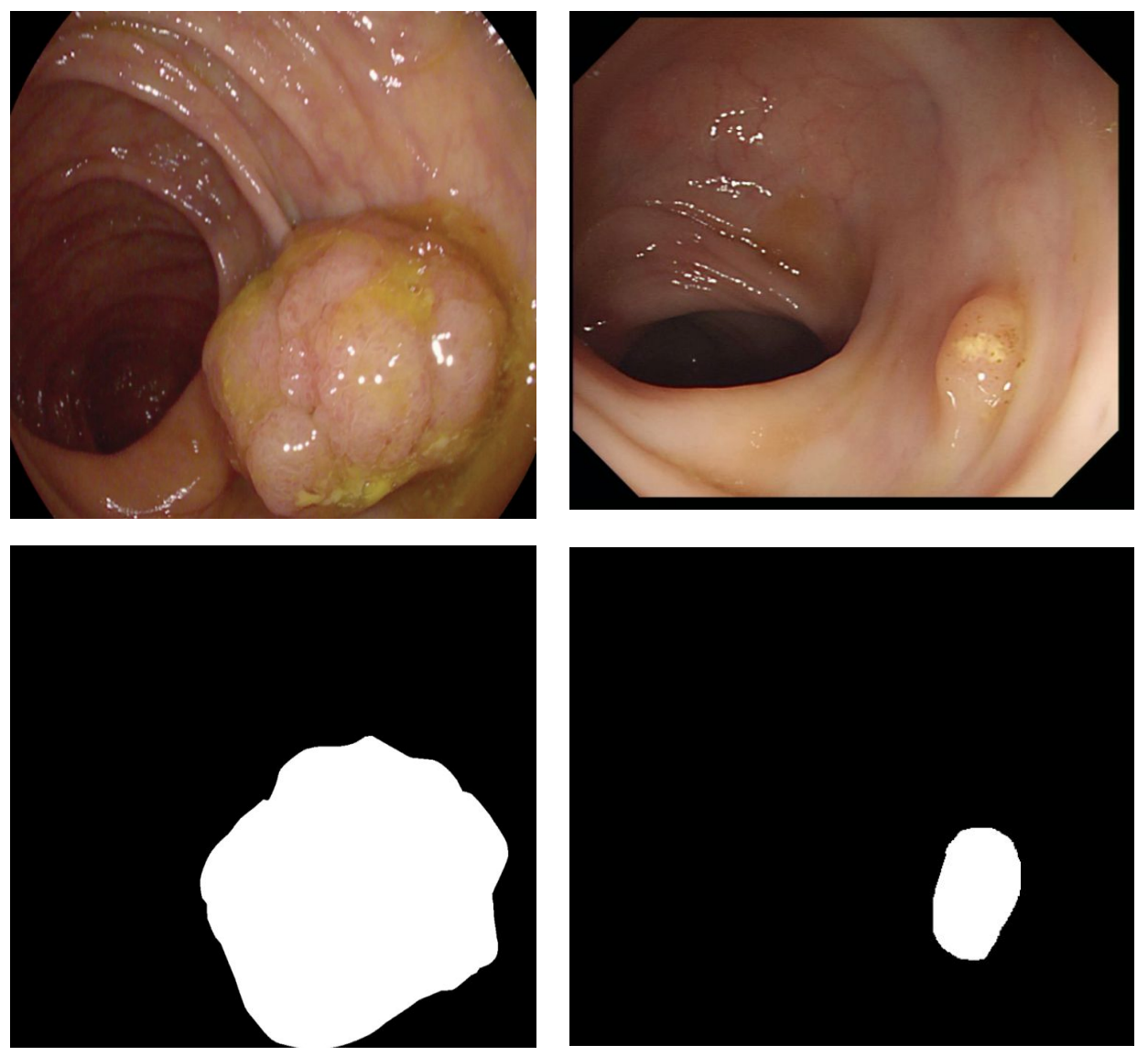
Polyp segmentation
 Pogorelov, K., Randel, K., Griwodz, C.,
Eskeland, S., Lange, T., Johansen, D., Spampinato, C., Dang-Nguyen, D.T., Lux, M., Schmidt, P.,
Riegler, M., & Halvorsen, P. (2017). KVASIR: A Multi-Class Image Dataset for Computer Aided Gastrointestinal
Disease Detection. In Proceedings of the 8th ACM on Multimedia Systems Conference
(pp. 164–169). ACM.
Pogorelov, K., Randel, K., Griwodz, C.,
Eskeland, S., Lange, T., Johansen, D., Spampinato, C., Dang-Nguyen, D.T., Lux, M., Schmidt, P.,
Riegler, M., & Halvorsen, P. (2017). KVASIR: A Multi-Class Image Dataset for Computer Aided Gastrointestinal
Disease Detection. In Proceedings of the 8th ACM on Multimedia Systems Conference
(pp. 164–169). ACM.
Synth-colon dataset
Synth-colon dataset
- 20.000 synthetic images
- Self-annotated
- Depth maps
- 3D objects
Synth-colon dataset

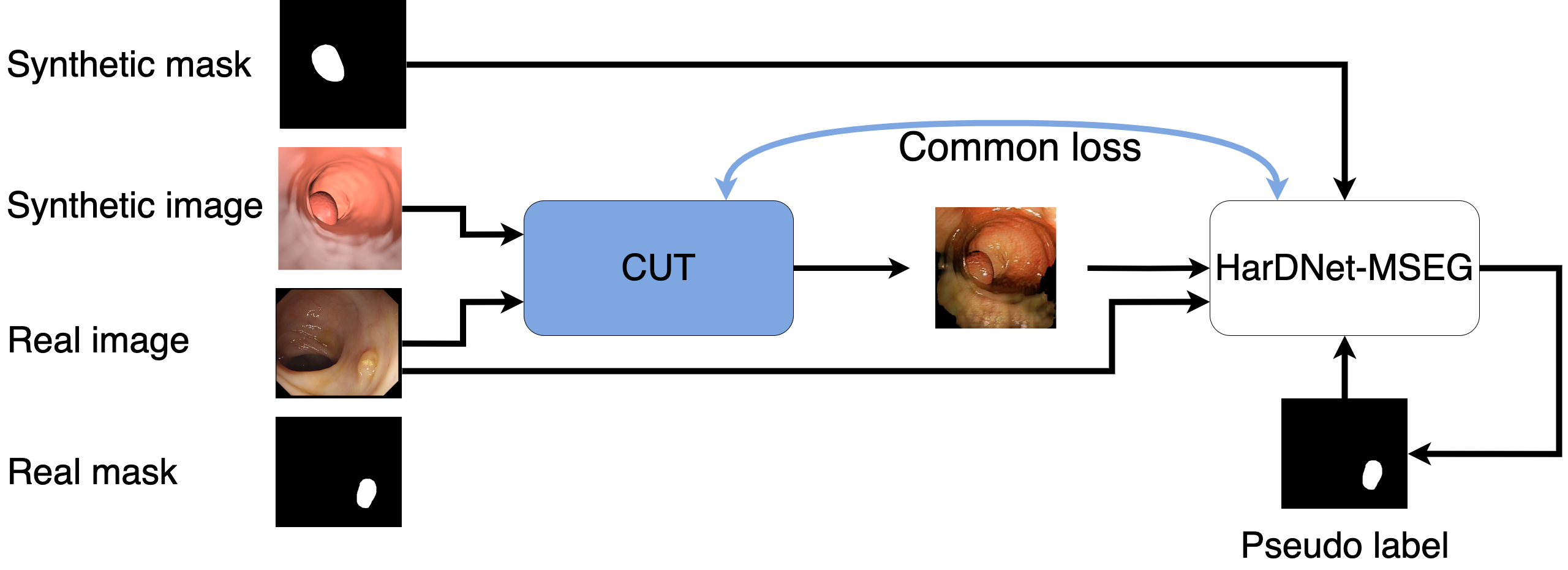
Adapting a synthetic dataset
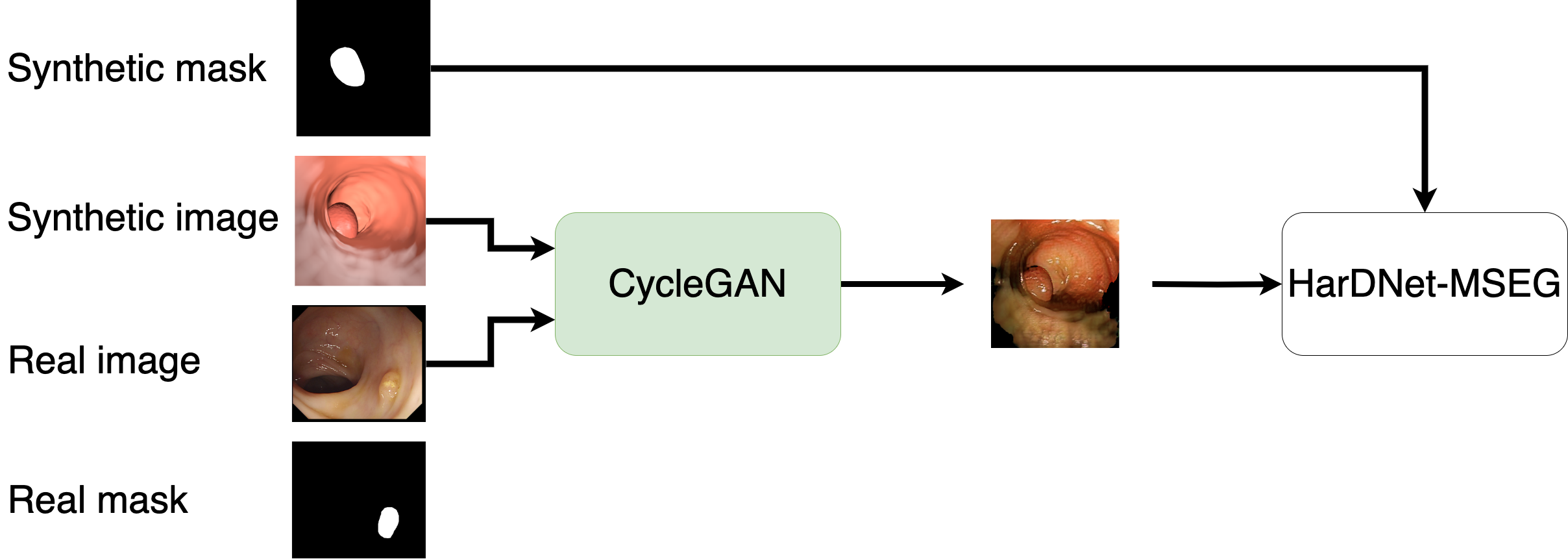 Zhu, J. Y., Park, T., Isola, P., & Efros, A. A.
(2017). Unpaired image-to-image translation using cycle-consistent adversarial
networks. In Proceedings of the IEEE international conference on computer vision
(pp. 2223-2232).
Chien-Hsiang Huang, Hung-Yu Wu, & Youn-Long Lin.
(2021). HarDNet-MSEG: A
Simple Encoder-Decoder Polyp Segmentation Neural Network that Achieves over 0.9 Mean Dice
and 86 FPS.
Zhu, J. Y., Park, T., Isola, P., & Efros, A. A.
(2017). Unpaired image-to-image translation using cycle-consistent adversarial
networks. In Proceedings of the IEEE international conference on computer vision
(pp. 2223-2232).
Chien-Hsiang Huang, Hung-Yu Wu, & Youn-Long Lin.
(2021). HarDNet-MSEG: A
Simple Encoder-Decoder Polyp Segmentation Neural Network that Achieves over 0.9 Mean Dice
and 86 FPS.
Adapting a synthetic dataset
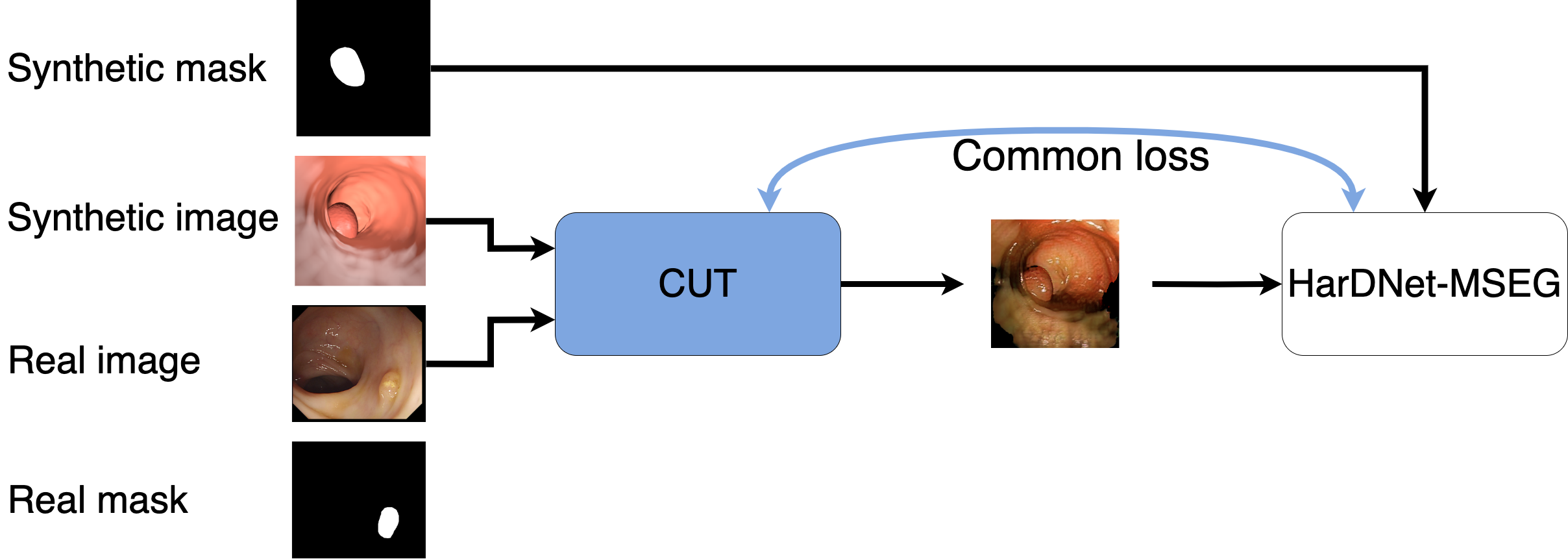 Taesung Park, Alexei A. Efros, Richard Zhang, &
Jun-Yan Zhu (2020). Contrastive Learning for Unpaired Image-to-Image Translation. In
European Conference on Computer Vision.
Taesung Park, Alexei A. Efros, Richard Zhang, &
Jun-Yan Zhu (2020). Contrastive Learning for Unpaired Image-to-Image Translation. In
European Conference on Computer Vision.
net_G = CutGenerator()
net_S = HarDMSEG()
adapted_image = net_G(synthetic_image)
prediction = net_S(adapted_image)
loss_G = criterion_G(adapted_image, synthetic_image)
loss_D = criterion_D(adapted_image, synthetic_image)
loss_S = criterion_S(prediction, synthetic_label)
loss_GAN = 0.1 * (loss_G + loss_D) + 0.9 * loss_S
loss_GAN.backward()
Synthetic
CycleGAN
CUT
CUT-Seg
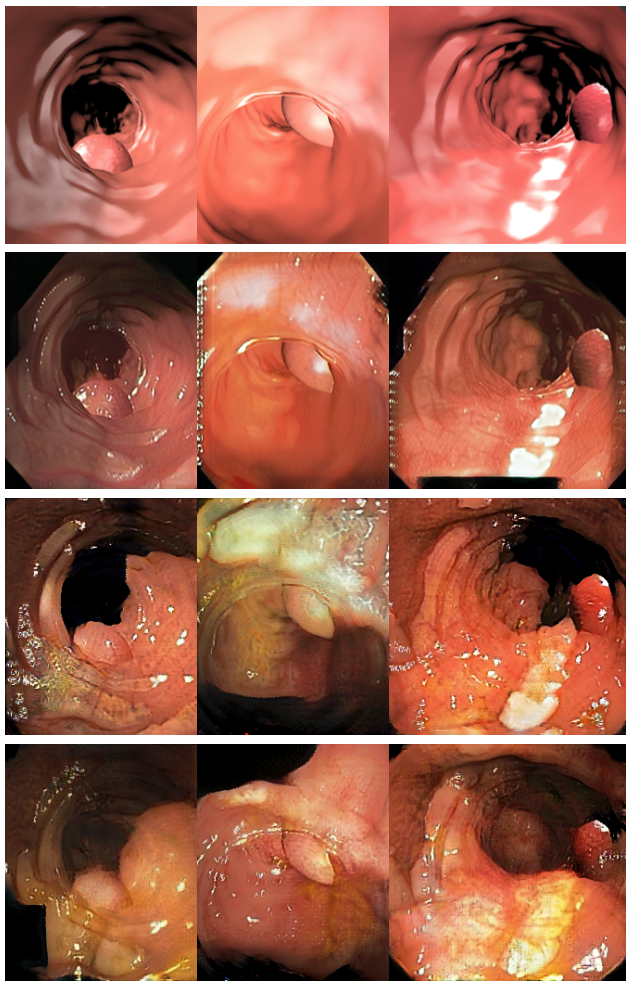
Synthetic data is not enough
Pseudo-labels
☐Enric Moreu et al. “Self-Supervised and Semi-Supervised Polyp Segmentation
using Synthetic Data”. In International Joint Conference on Neural Networks
(IJCNN). June 2023.
☐Enric Moreu et al. “Fashion CUT: Unsupervised domain adaptation for visual pattern classification in clothes using synthetic data and pseudo-labels”. In Scandinavian Conference on Image Analysis (SCIA). April 2023.
☐Enric Moreu et al. “Fashion CUT: Unsupervised domain adaptation for visual pattern classification in clothes using synthetic data and pseudo-labels”. In Scandinavian Conference on Image Analysis (SCIA). April 2023.
Exposing the model to real-world images
Closing the gap with pseudo-labels
Contributions
Contributions
- Domain Randomization geometry transformations
- Synth-Colon dataset
- Train a polyp segmenentation model without labels
- Semi-supervised framework for polyp segmentation